NEXUS: explainable and unified spatial reasoning and sensor fusion

Key Points
- DAIRNet Theme: Autonomous Processing and Reasoning
- RMIT University and The University of Melbourne
- Point of contact: Prof Matt Duckham
bottom line up front
NEXUS addresses the problem of how to make sense of the deluge of physics-based and human sensor data for more timely and accurate intelligence. The project developed a real-time, streaming geospatial intelligence analytics system capable of support a very wide range of queries, with a particular focus on movement analytics. The system is compatible with standard reference system architectures in defence and industry. Building on this foundations offers the potential to support a widening range of more sophisticated queries, including causal reasoning about the intentions of moving objects.
problem addressed
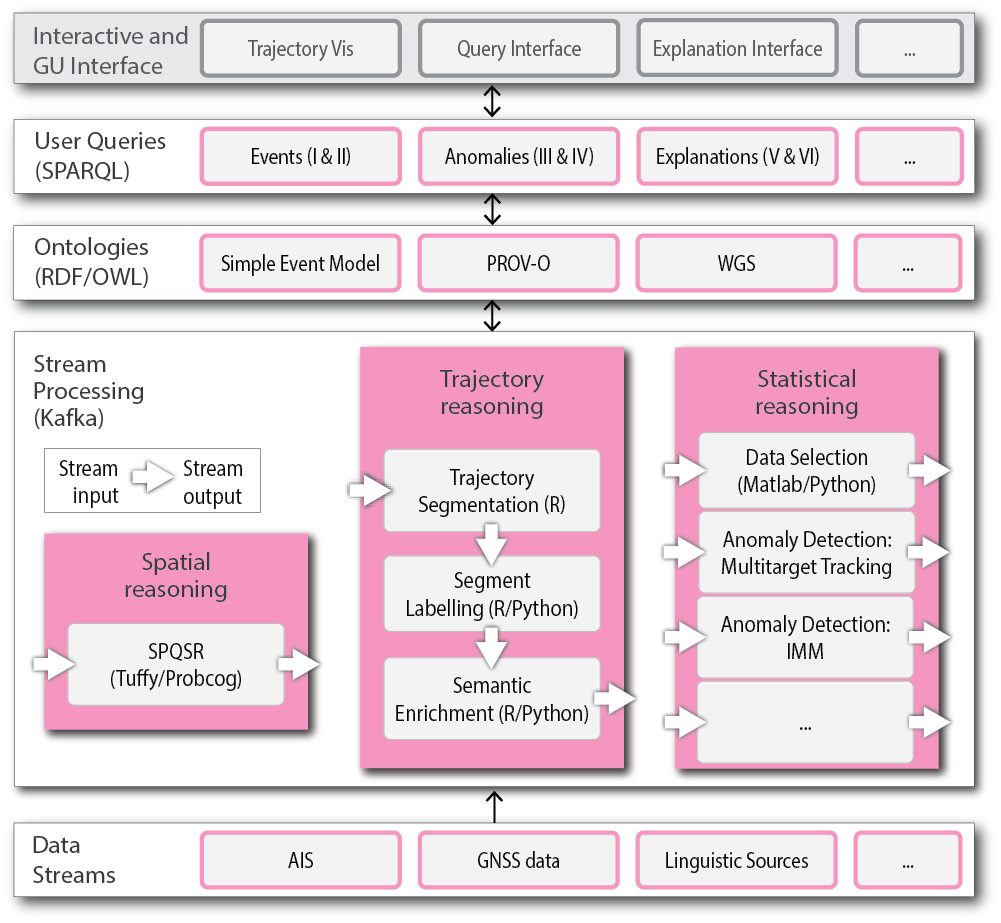
NEXUS is a modular system-of-systems designed to unify high- and low-level fusion of uncertain spatial and spatiotemporal data. Combining probabilistic Bayesian and logical spatial reasoning provides a consistent and rigorous treatment of uncertainty. Together with automated explanations to “why” questions, NEXUS transparently justifies system responses, helping build trust for operators.
outcomes
NEXUS demonstrated the capability to construct:
- a highly configurable, modular system-or-systems that enables standardised integration and connection of a wide variety of both quantitative and qualitative reasoning components;
- a wide range of basic queries to the system about reasoning outputs, including locative, associative, comparative query types;
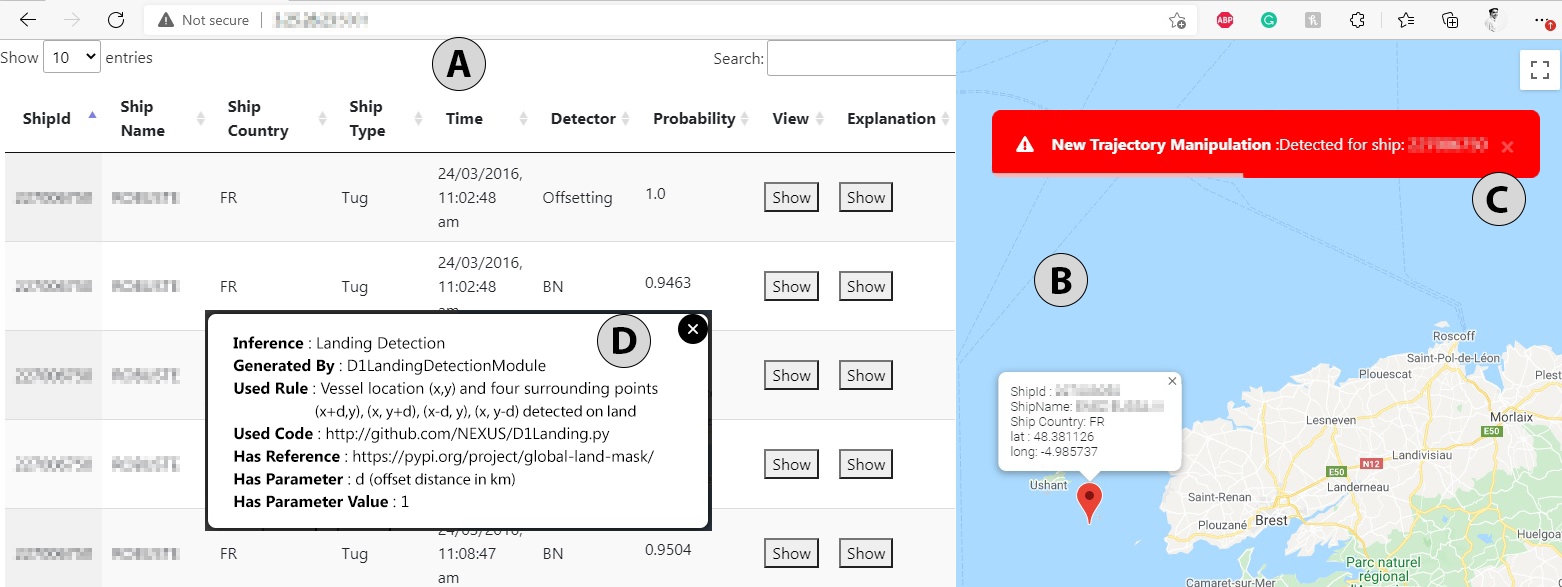
- a wide range of interrogative queries for basic explanations about reasoning conclusions, such as trace-based
- explanations of the steps taken to arrive at a particular result.
the big picture for Defence
The NEXUS system provides a simple, consistent, standardised framework and technology for building, sharing, and collaborating on complex and real-time intelligence analytics and spatiotemporal data fusion. This approach is tightly integrated with the capability to explain and justify system outputs, underpinned by a rigorous approach to uncertainty. In turn, this releases analysts and future researchers to focus more on more advanced capabilities, such as intention recognition and causal reasoning.
video
Watch Matt Duckham’s presentation about this project at the 2021 DAIRNet Symposium.


